Humans love their adorable little psychopaths. They may be cute but inside they are 14 pounds of murder.
Who knows the exact date of domestication but imagine you are Grugdoug and you have found yourself a murder floof. He follows you inside your mud hut and demands subsistence. As a good slave, you oblige your newfound master.
These adventures continue, making cat beds out of mammoth fur, finding dead squirrels in your bone hammock, etc.. You are now comfortable around your kitty. But oh no, the foods out and all that’s left is your cat.
Now this is a cat we are talking about here, a simple kill or be killed point system won’t suffice. So up to 3 points for a kill, 3 for inflicted suffering, and 3 for humiliation. Oh and your name is Grugdoug so all you are wearing is a loincloth.
You reach for your cat, only to find he is gone. Cats know when the food is out. Don’t think he didn’t notice humans can’t scratch their own back. Hiding on the roof of the mud hut, the cat makes his leap. The blender of death is now upon you.
Attempts to grab the blender are null and void. Fast as lighting the cat dodges your every move, leaving swaths of crimson in his wake. In a final effort you manage to catch enough fur and pull your formal friend away.
Snapping its neck awards you 3 points. However it was a quick death so 0 points for suffering. A death in battle is no humiliation for a cat, he will enjoy his pets in Valhala: 0 points.
You dress your wounds with old leaves and some chewed up grass because your name is Grougdoug. You feel alright for a few days until the fever kicks in. The blisters are tolerable but the coughing fits are killer. You die a few weeks later, drowned in your own secretions. Cat is awarded 3 points for a kill, 3 points for suffering, and 3 points for humiliation because you died to a 14 pound cat you imbecile.
So let this be a lesson, don’t eat cats in caveman times. Also listen to your shaman and use chewed up moss to treat your wounds!
I first tried Dragon dictation around five years ago and it was not a good experience. Commands were not followed, and the accuracy was not very good. However, after just trying Dragon dictation version 15 for 10 minutes, I was able to write this blog post. I thought it was because of my voice not being very accurate, but now I see it was just because the software was not advanced enough. I am now very excited to see how far I can push this software, and now I can spam my blog with many more posts. As I said earlier writing at five words a minute by clicking on the on-screen keyboard is very aggravating. But just being able to talk and have the computer type faster than I can even speak is much better for productivity. As of this moment I will no longer be clicking on the on-screen keyboard ever again, except to add new vocabulary to the software. Writing just these 200 words would have taken me at least 30 minutes, but I just wrote this in less than three.
Do you lay awake at night thinking what is the world’s best wheelchair? I am glad you asked because you are in luck! I happen to be the world’s leading wheelchair designer. So naturally it follows I will build the world’s best wheelchair! But before I begin, we must go over what a wheelchair does. Then we will go over what normal wheelchairs are like and why they are all complete garbage. Then and only then can we go over my masterpiece.
Conventional wisdom would have you think a wheelchair is a prison. A wheelchair is seen as the bridge between normal and disabled. But a wheelchair actually signifies freedom, an American flag on wheels you could say. Without a wheelchair, I and millions of others would be stuck in bed forever. While parents are inside grieving because of their child’s first wheelchair, the child is outside doing donuts in the driveway. A wheelchair instantly gives agency of movement back to the user, this is something that most cannot understand until they need to use a chair. People will feel bad you are in a wheelchair, but not because of your underlying condition. The wheelchair is all they see so it is hard to realize the nightmare happened before the wheelchair, not because of it. This defeatist attitude is why society wallows in despair that wheelchairs can’t reach places, instead of just building a damn ramp. Or why van spots are all the way in front because moving your finger half an inch is like climbing Everest. Disabled people already have the tools to be independent, society is the one left behind. So, a wheelchair’s main function is to reach as many places as possible, regardless of what society thinks.
So, what is wrong with modern wheelchairs? In short, everything! They have outdated batteries, outdated motors, overweight frames, uncomfortable tires, and antiquated electronics. Their design has not changed much in well over 25 years. Innovation has taken a backseat because of naïve regulations which I will get to in another post. But for sake of this post, I will say regulations are worded in such a way that prevents any improvement without prohibitive costs which prevents new companies from taking over.
Let’s start with the batteries, or should I say lead bricks. Power wheelchairs are still using lead acid batteries. There is no current legitimate design decision today that makes lead batteries acceptable for wheelchairs. They are only used because that is what has always been used. Back when these wheelchairs were designed lead batteries were the only existing choice. Lead-acid batteries are heavy, have a range of 7 miles, and only last for one year. This is on top of them costing $400 each, when you need two.
Moving on to the motors. These motors are not so bad actually. They have more than enough torque available, they are attached to adequate gear boxes, and don’t need active cooling. The problem is that they are dinosaurs. Most wheelchairs still use oversized brushed motors the size of a 1-liter bottle, when a brushless motor the size of a pill bottle can have similar power. While this small motor would likely overheat, you get the idea.
Invacare did experiment with gearless brushless motors about 20 years ago, and a chair with these motors may still be available. Unfortunately, Invacare was too early, and these motors were not widely adopted. They were plagued by reliability problems due to the connection used and electronics. Brushless motors have improved during the last decade, but the real advancement has been in the motor speed controller department. Quality speed controllers are smaller and more advanced than ever before. I don’t know what caused these advancements but If I did know I sure wouldn’t be an electrical engineering student!
Next we should talk about the current wheelchair types.
First up we have mid-wheel drive, the chair I usually have. Two drive wheels in the middle with castors all around. This allows turning in place at the expense of having castors hitting everything. When a castor encounters a single obstacle, (for example; a curb, threshold, pebble, doorway, table leg, slight lip, pavement crack, garden hose, ramp, tree root, gopher hole, or speed bump), the wheelchair stops dead. Which results in language often described as fowl. These chairs do drive the best out of the big three.
Next up is Front Wheel Drive, which I am sitting on currently. The drive wheels are pushed forward slightly with castors in the rear. In theory having larger wheels encountering the obstacle first allows the chair to pull itself up and over. This kind of works but I still cannot clear an obstacle greater than 1.5 inches. FWDs also cannot turn in place easily, it requires finesse which not every user possesses. They also drive like complete horseshit, the chair does whatever it feels like and is unpredictable. This is because unassisted FWD chairs cannot drive straight, they need a computer getting in the way to be operable.
Third is rear-wheel drive, no picture but it is just FWD flipped 180 degrees. Preferred by users with good upper body control because this type can do wheelies on command. Allowing obstacle clearance and fun. However, these chairs have front castor fluttering, like a bad shopping cart, and cannot stop on a hill without turning in dangerous ways.
Last but not least we have 4×4 wheelchairs. The internet is full of custom wheelchairs with four drive wheels and no steering. Like most wheelchairs, these custom builds use skid-steer where both sides move in opposite directions to turn. While skid-steer is simple to implement, it also drains the battery quite quickly especially with four motors.
To conclude this section about current wheelchairs. Brushed motors are ancient, lead-acid batteries are not good enough, and current frame designs have too many issues. Lastly wheelchair electronics are designed with lead-acid, brushed motors, and two-wheel drive in mind. So, everything to do with current wheelchairs needs to be thrown out. We need to go back to the drawing board, but thankfully I am here.
My design
Before I get into the nitty gritty of the design, I must list my objectives first. My wheelchair must:
Turn in place
Go to as many places as possible, we are aiming at stairs here.
Drive on soft surfaces, such as loose sand i.e. the beech
Have excellent range
Outrun a mugger
Places to be, people to see
Many times sidewalks do not have curb cut-outs, doors have a 3 inch threshold, stairs are stairs, and walkways have gaping pot-holes. These obstacles, except stairs, are all fixable and in the United States are required by law to be fixed. However, federal law oftentimes gets ignored as “its too expensive” is an often used excuse. Therefore my wheelchair will need to cast aside these obstacles and power over them. So how do we accomplish this? Simple, the chair must be off-road capable, then human areas will be nothing.
“Davis you crazy bastard” you say, “Wheelchairs cant climb stairs, what are you thinking?”. To you, I would say watch this video below. Now this guy has no fear.
That wheelchair is the Extreme X8 by Magic Mobility, one of the best off-road chairs available. It is a 4×4 wheelchair with actual steering up front. The driver had to lean forward in order to not flip backwards, but the chair still defeated the stairs. What is this chairs secret? For one it has four motors, allowing all wheel drive instead of four-wheel-no-drive. Second it has a low center of gravity and a stable wheelbase, allowing steeper climbing angles. Wide air-filled tires just adds to the wonder. But the Extreme X8 does not have any suspension, nor does it have articulation of any kind. It defeated stairs without suspension. The enemy was vanquished without suspension. What would happen if the Extreme X8 DID have suspension? I will leave this question as an exercise for the reader.
In all seriousness, I think I have a great idea for a chair that combines the maneuverability of a mid-wheel drive with the obstacle clearing ability of the Extreme x8. I will elaborate more next time, but for now I just needed to post something.
After trying the fabric arm for a few minutes I felt lightheaded. Unfortunately the fabric arm needs to be very tight in order to be rigid enough to work. Being able to breath is more important than moving, therefore this option is not an option. My original plan, before plan fabric, was to use a “Steadicam” type device to balance my arm. Normally used to keep a camera perfectly balanced against gravity, it is also the mechanism used in many tool holding devices, lamps, microphone arms, and many existing mobile arm supports. Unable to afford one of these devices, I 3d printed my own. It may yet work but it has a few problems.
One, it only works when perfectly perpendicular to the ground. This will cause problems when I need to tilt my chair or drive on New England pavement. This could be fixed by attaching the whole assembly on a pivot that maintains its position with respect too gravity. This would not work when the chair is tilted in the Y plane, and adds bulk which leads to problem number two.
Two, this mechanism is very bulky. It adds a foot and a half of width to both sides of my chair. My chair is already 30 inches wide and barely fits through doors. Taking the devices off every time I encounter a door would negate any independence these devices give me.
Three, it may be too late. A passive exoskeleton still requires some strength to use, strength I had that is now gone. An active device is another story.
The easy part of an arm exoskeleton is the elbow, its only one degree of freedom and sensing my muscle movement should be easy. There are medical devices that do this already, however they are useless to me without the shoulder. Fortunately shoulder support exoskeletons are popping up everywhere. Intended for the factory environment to reduce workplace injuries from repetitive above head motions, they could be repurposed for my use instead. Not so fortunately, these products cannot be used while sitting down in a chair. These devices could be modified and placed on the back of my wheelchair however. The most compact design I have found so far is the Ottobock Paexo, and a close second is the ShoulderX from SuitX.
The ShoulderX could probably be attached to my wheelchair without any modification, however this design is not very flexible and must be placed in a particular way. This is disappointing as this design could easily be motorized without adding much bulk.
The Paexo design has given me an idea.
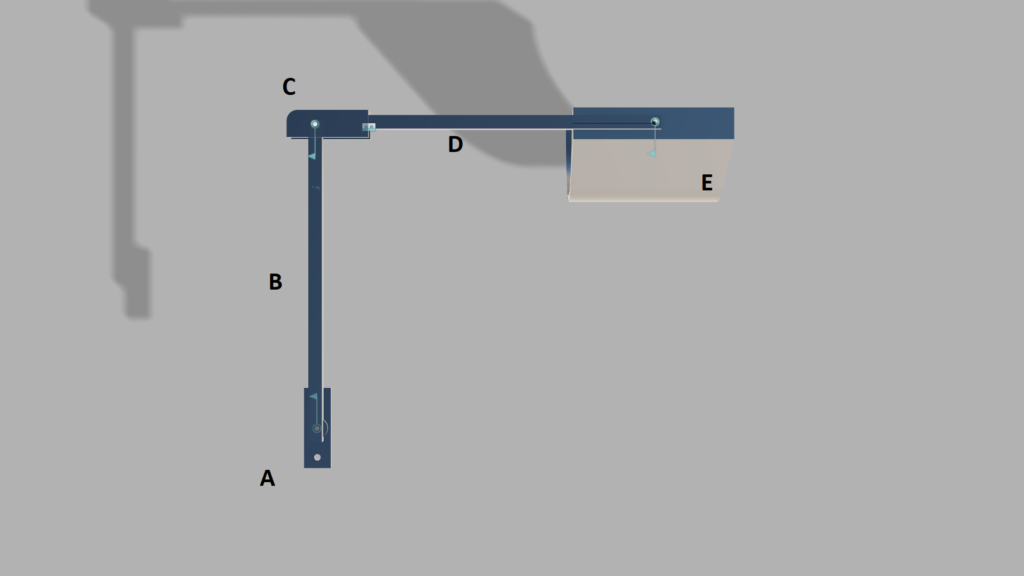
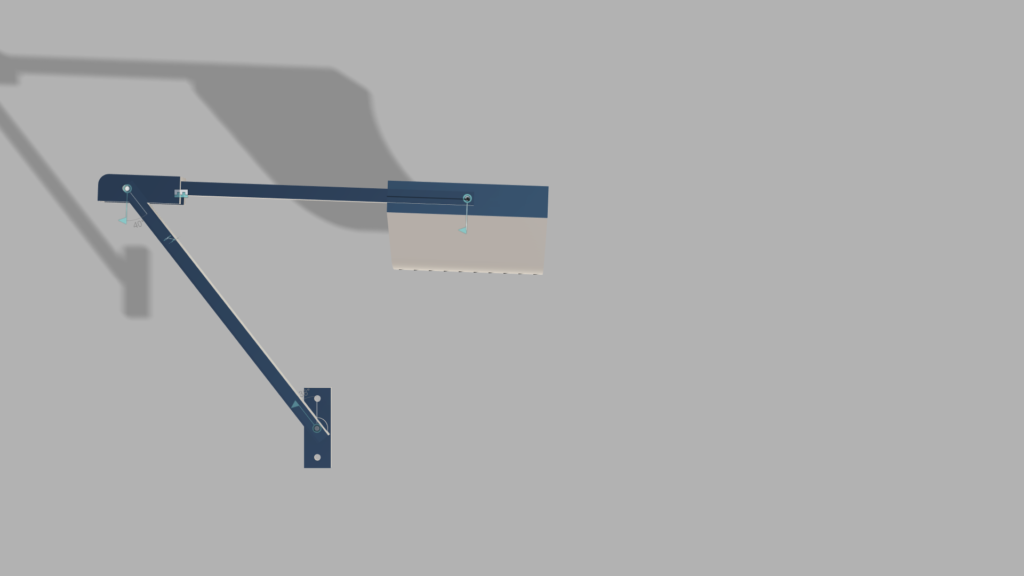
Here is a quick sketch of my next idea:
I’m nowhere near done but the basic idea is here. Here is a quick rundown:
E This is the brace that will be strapped to my arm, allowing the rest of the device to move my arm around.
D Just the rod connecting E to C, it has no joints except for a ball joint attaching to E
C This is a revolute joint between D and E
B The rod connecting C to A, not shown is B can twist, allowing side to side movement of E
A The attachment bracket for my wheelchair’s side rail. Also contains a revolute joints for B
This device will need to be motorized on every joint and that presents my largest hurdle. This device i’m now calling Plan C, is really a robot arm in disguise that uses my arm as it’s payload. I need to learn too many things before I can tackle this, advanced topics that need years of study to understand. I’m leaving the realm of screwing around and into Engineering. I can’t afford to hire an Engineer, so my only option is to become an Engineer myself. So I enrolled in college for Electrical Engineering and will start soon.
Typing without functioning limbs is very slow. When I was stronger, my peak touch typing speed was 100 words per minute. That was almost an acceptable typing speed for me. However I am now reduced to 8 words per minute if I strain myself very hard. I lost my ability to touch type years ago so now I use an on-screen keyboard. This the same as a smart phone keyboard but I use my mouse to click each letter instead.
I have tried speech recognition but it is garbage. My disease has altered my voice just enough that these programs can’t recognize my speech. Talking is also tiring for me so even dictation is out.
One solution I found is using a Sip and Puff switch to type with morse code. It is a straw that detects sucking(sip) and blowing(puff) and converts it into a switch. This switch then plugs into a microcontroller that converts the morse code into a usb keyboard. With practice users can get 30wpm using this technique. Turning this 30 minute blog post into a 10 minute blog post.
While I continue to work on my exosuit, I also need a plan b. Enter Butterfingers. Butterfingers is going to my personal robot that will pick things off the floor, hold cameras, and assist with everyday tasks.
I am not Tony Stark so my Butterfingers will just be a remote control arm on top of my old wheelchair. Vaguely in the shape of an excavator but with wheels instead of tracks and a grapple instead of a bucket. So far I have torn apart the wheelchair carcass and harvested it’s electric guts. My old wheelchair seat was fully actuated, it could recline, tilt-in-place, and both leg rests could move up and down. I only needed these actuators for the arm, but the rest of the electronics are for another project where I will connect my joystick to my pc. Here is the damage report:
Excuse the horrible cellphone image but the center contains the wheelchair base we are working with. While it pains me to see my high school chair bleeding on the floor like that, it is for it’s own good. It died on the same hill twice. The first time I welded the right side motor contacts together. The second time I don’t know what happened but it is the motor I have to work with. Taking the chair apart was a real treat seeing how it all worked. Removing the seat saved at least 150 pounds from the frame.
My original plan was to remove the actuators, which are just regular screw drives, and make my own brackets. However the tilt actuator is much stronger than anticipated. I was thinking 1/4 inch steel at most for the brackets. But the tilt actuator was attached with what appears to be 1/2 inch steel. I guess lifting 300 pounds all day is not trivial.
So the new plan is: Keep the original tilt mechanism for the Main Boom, use the recline actuator for Swing Boom, and a leg rest actuator for bucket control. Unfortunately my pc died and my new pc stole my entire project budget. But my pc is the most important tool so it must come first. Once the budget comes back, the first order of business will be powering the actuators and discovering their minimum and maximum lengths so I can model the geometry of the arm in Fusion 360.
Exoskeletons and other assistive robotics can never truly takeoff until they can be controlled properly. Even the best robots in the world can’t out-walk a toddler. This problem only gets worse when the robot is attached to a human. Humans and machines will always argue until the day they die over who is in charge.
Frustration occurs whenever a machine disobeys a direct order. Over-aggressive abs and traction control in a car, aim assist in video games, a wheelchair defeated by a half inch curb, all examples of machines gone wrong. All machines should aspire to be a microwave, you enter 30 seconds you get 30 seconds. If you tell a machine to jump it should not ask how high, it should just jump. If you wanted a certain height you would have specified.
There needs to be a way to control more outputs than current means. It takes two human arms to control one robot arm, see an excavator, and that does not include fingers. It would be much better if we had access to the spinal cord’s output to our limbs.
Reading intent from muscle movement is hard because we cant put sensors inside where they are needed.
Our body is controlled by opposing muscles, each pulling a joint up or down. Lets use the elbow as an example. The bicep pulls your forearm up, and the tricep pulls it down. However this is not all they do, your brain can also vary the stiffness of your limbs. It does this by pulling both the bicep and tricep at the same time, in order to lift more weight or have more precise control.
Muscles by themselves are not precision instruments but this effect makes them so. Now imagine if your brain had direct control over a electric motor.
Propose you had a device that could measure the intended power of every muscle in the human body. And you wanted to control the elbow motor of an exoskeleton. This motor is attached to a variable gearbox.
To gear the motor up or down we need simply to use the variable stiffness built in to our brain. When the bicep and tricep are both pulling hard, gear down, when they’re relaxed, gear up. Use the difference between the bicep and tricep for motor direction. Effectively the same mix for tank drive on a single joystick.
This would also save power because gearing down keeps joints in place without powering the motor. Also gearing down gives more torque, allowing for greater deadlifts and other feats of “strength”.
My first attempt at an exosuit is going to be based on a cheap compression shoulder brace and elbow sleeve. These will be attached together with nylon webbing ensuring the load path travels past my shoulder. Actuation will consist of bowden cables attached to both the top and bottom of my elbow. Acting like a replacement for my bicep and tricep muscles.
This is based on the device in my second reference below. However they used a very complicated motor and pulley system that I believe is unnecessary. Instead I will use two springs, one for each bowden cable.
The A-gear, see below, also uses two springs. In fact it is my inspiration. From the A-gear I discovered two springs can statically balance 4 degrees of freedom.
These devices also share another similarity, they are the exact same device! Think about it, one is fabric, the other is aluminum but look closer and you will see. They both pull on the same points on the arm and forces are redirected in the same manner. Achieving the same goal with different materials.
The main problem with a passive spring based approach is it may be too late for me. A decade ago I would have had enough strength but now I have almost nothing. I tried the compression sleeves and the friction was noticeable. I have a backup plan for motor assistance just in case.
Starting a blog is harder than I thought. Apparently blogs need privacy policies now? Anyway now what? I made a website with my own name and now I’m fresh out of ideas. I guess I will start with my current problem: I can’t fucking move!
To solve this I need an exoskeleton, specifically an upper body version which current companies seem to be allergic too. After researching a bit (every night for past 3 years) I think I found a solution that will work inside a wheelchair. There are working solutions that work outside a wheelchair which I will get into in another post.
A common theme among my research is that the human arm can be balanced on a single point located on the forearm. Attaching a spring loaded device to this point removes the sensation of gravity, allowing free movement. My next post will go into more technical detail.